Roboter-gestützte Kooperation für räumlich getrennte Personen
Der Fachbereichstag Informatik (FBTI) prämiert jährlich die deutschlandweit besten Informatik-Abschlussarbeiten und vergibt je einen Preis für die Kategorien Bachelor, Master und Promotion. Der FBTI ist eine Dach-Organisation für über 60 Informatikfachbereiche und -fakultäten an Hochschulen für Angewandte Wissenschaften/Fachhochschulen mit insgesamt über 100 Studiengängen, ca. 1.000 Professorinnen und Professoren und mehr als 30.000 Studierenden. Stifter des mit 1.000 Euro dotierten Informatikpreises ist die IT-Systemhaus CEMA AG.
2018 wurde die Abschlussarbeit von Martin Feick, Informatik-Student der htw saar, als beste Bachelor-Thesis ausgezeichnet.

Im Rahmen eines Forschungsaufenthalts arbeitete er an der University of Calgary (Kanada) mit weltweit führenden Forschern im Bereich „Human Robot Interaction“ und „Human Computer Interaction“ zusammen (Prof. Dr. Anthony Tang, Prof. Dr. Lora Oehlberg und Prof. Dr. Ehud Sharlin). Auf deutscher Seite wurde die Thesis von Prof. Dr.-Ing. André Miede betreut. Feick studiert derzeit an der htw saar im Master-Studiengang Praktische Informatik und wird seine Thesis voraussichtlich in einer Kooperation mit dem University College London bearbeiten.
Die Thesis mit dem Titel „Implementing a Humanoid Tele-Robotic Prototype for Investigating Issues in Remote Collaboration“ beschäftigt sich mit der Roboter-gestützten Kooperation für räumlich getrennte Personen. Ein typisches Szenario könnte so aussehen, dass zwei Personen an unterschiedlichen, räumlich getrennten Standorten das Design eines neuen Produktes diskutieren wollen. Ein konkretes Beispiel ist das Design von Handprothesen für Kinder. Hier gibt es eine weltweite Community, die sich damit beschäftigt kostenlose Prothesen für Kinder zu designen, die einfach mit einem 3D-Drucker ausgedruckt werden können. Über die letzten Jahre haben sich das Design und die Funktionalität durch den internationalen Austausch stetig verbessert.
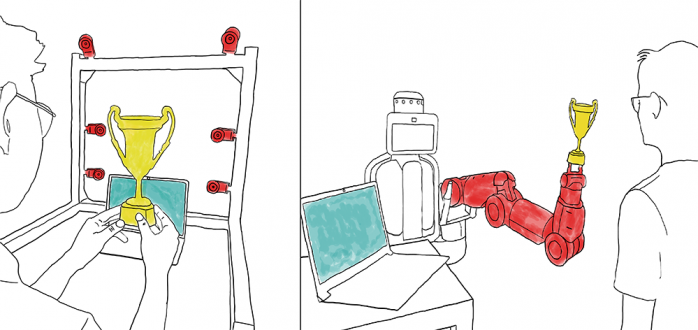
Zu dem geschilderten Szenario wurde im Rahmen der Bachelor-Thesis ein System konzipiert und entwickelt, mit dem physisch am entfernten Arbeitsplatz auf ein Objekt zugegriffen werden kann. Dieses kann auf beliebige Weise so bewegt werden, dass beide Personen auf ein synchronisiertes Objekt schauen können. Dies geschieht mithilfe eines OptiTrack-Systems und eines Baxter-Roboters. Wenn also die Person vor dem OptiTrack das Objekt bewegt, führt der Roboter genau diese Bewegung an einem entfernten Ort aus.









0 Kommentare in “Roboter-gestützte Kooperation für räumlich getrennte Personen”